Minimize Surprise
Generating collective behaviors by minimizing surprise and maximizing prediction success
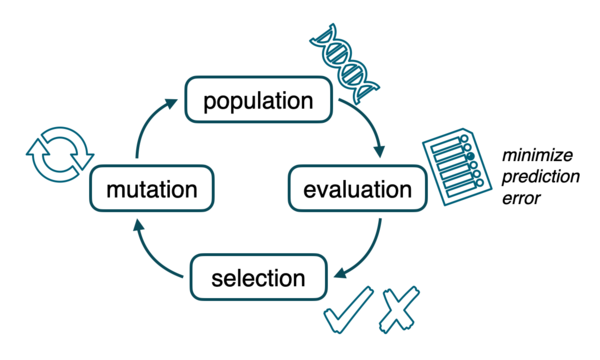
Similarly to evolving controllers for single robots also controllers for groups of robots can be generated by applying evolutionary algorithms. Usually a fitness function rewards desired behavioral features. Here, we investigate an alternative method that generates collective behaviors almost only as a by-product. We roughly follow the idea of Helmholtz that perception is a process based on probabilistic inference and evolve an internal model that is supposed to predict the agent’s future perceptions. Separated from this prediction model the agent also evolves a regular controller. Direct selective pressure, however, is only effective on the prediction model by minimizing prediction error (surprise). Our results show that a number of collective behaviors emerge by this approach. Our method has potential to be an approach to open-ended evolution.
We have published the initial method back in 2014. In more recent work, we have shown the potential for diversity of emerging collective behaviors using minimize surprise and we have shown first multi-robot experiments on real robots.